Core challenge
Robotics teams often suffer from slow environment iteration, fragmented simulation assets, and weak handoffs between model experimentation and real hardware deployment.
Shailka-Robotics angle
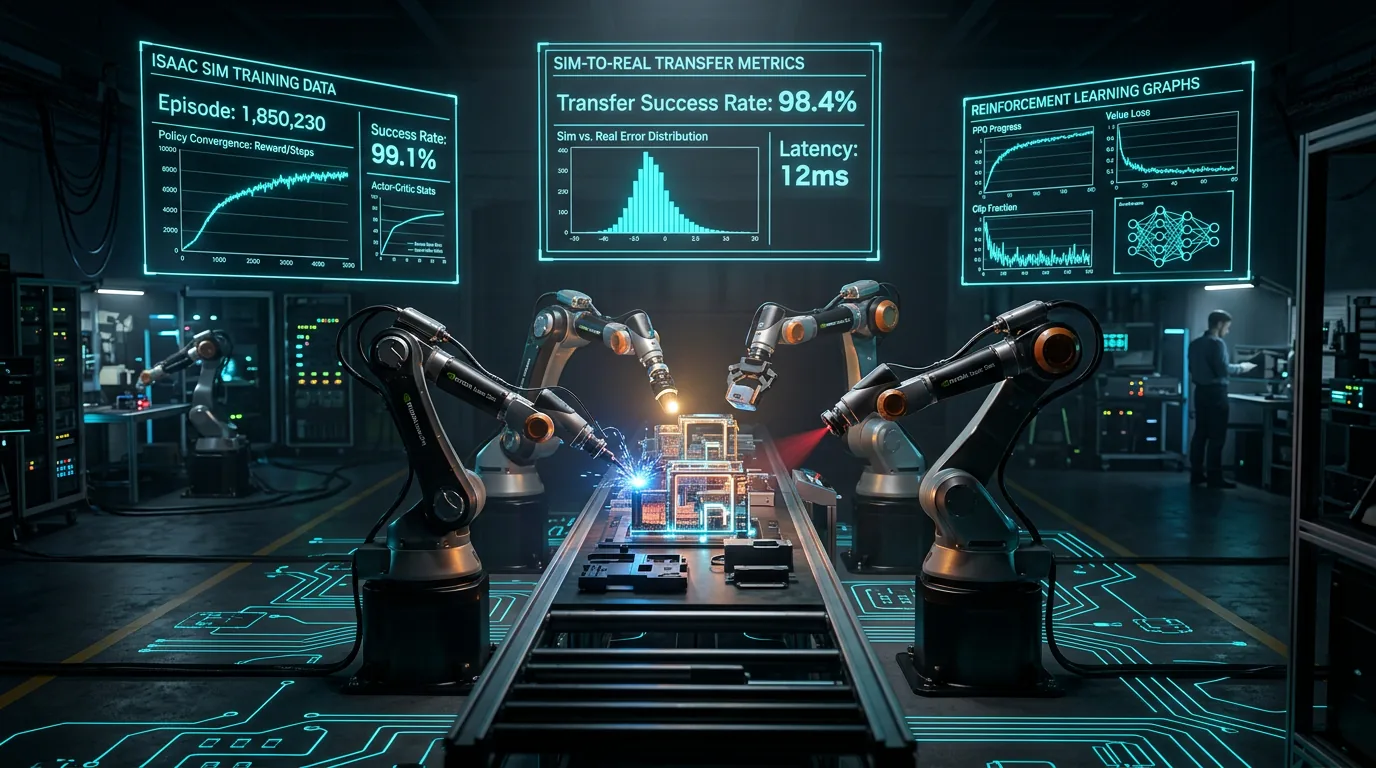
We use Isaac Sim, Isaac Lab, and Replicator to create simulation-first delivery programs that keep training, environment design, and rollout criteria tightly connected.
Typical fit
This solution works best for manipulation programs, warehouse automation, and robotics R&D teams trying to accelerate deployment readiness.